福島第一原子力発電所 建屋内で活躍するロボットについて(その2)
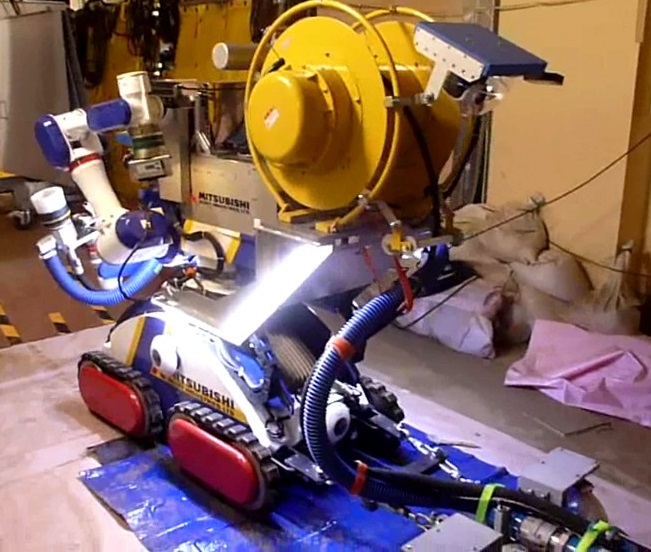
三菱MEISTeR(マイスター)
~ ロボットが撮影した原子炉建屋(2号機)内部の映像 ~
福島第一原子力発電所の建屋内で活躍するロボットの第二弾として、「三菱MEISTeR(マイスター)」をご紹介します。
2014年3月、マイスターは2号機原子炉建屋のオペレーションフロア(以下、オペフロ)の汚染度を調べて今後の燃料取り出し工法の判断材料にするため、オペフロ床面のコンクリートコアを採取する作業を行いました。
その際に撮影した建屋内の様子やロボットが作業する様子等を映像にてご紹介いたします。
作業にあたり、まず2号機建屋壁面にあるブローアウトパネル(瞬時や短時間での圧力上昇に対応するため、圧力逃がし弁等の動作不良時の安全確保用などに用いられる)の構台上に、マイスターを積載したコンテナを大型のクレーンで吊りおろし、遠隔操作にてオペフロに投入しました。
コアサンプルの採取は、オペフロの3箇所から行いました。
マイスターの先端アームの片腕にコアボーリング装置を装備し、もう片方のアームに装備されたコアサンプルを切り落とすタガネ(金属や岩石を加工するための工具の一種)とともに、両装置を駆使して行いました。装置は全て電動で、油漏れの危険性はない設計となっています。
採取したコアサンプルは、JAEA大洗研究開発センターへ送り、詳細な分析を行いました。
- マイスターの仕様その他については、IRIDホームページの「R&Dトピックス」に掲載していますので、ご覧ください。
- https://irid.or.jp/topics/
- [写真]クリックすると大きいサイズの画像が開きます。
- [動画]「動画ダウンロード」をクリックすると、ZIP圧縮したMP4の動画データをダウンロードできます。
【写真】

【動画】
-
マイスターコアサンプル採収のための搬入
-
コンテナセンターから(10倍速)
-
マイスターのカメラから(10倍速)
- 研究開発
- 公開資料
- 平成30年度研究開発成果
- 平成29年度研究開発成果
- 平成28年度研究開発成果
- 平成27年度研究開発成果
- 研究紹介
- 原子炉格納容器内部調査装置(形状変化型ロボット)の実証試験の実施について(2015年4月20日)
- 原子炉格納容器内部調査装置(形状変化型ロボット)の作業訓練の実施について [日立GEニュークリア・エナジー](2015年2月3日)
- 原子炉格納容器(PCV)内部調査装置の開発状況について [東芝](2014年8月19日)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その3)水中遊泳ロボット(げんごROV)& 床面走行ロボット(トライダイバー)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その2)三菱MEISTeR(マイスター)
- 福島第一原子力発電所 建屋内で活躍するロボットについて「Rosemary(ローズマリー)」&「Sakura(サクラ)」
- 原子炉格納容器(PCV)漏えい箇所調査装置の開発状況について [東芝](2014年5月16日)
- ベント管内へ止水材(グラウト)を充填する「止水工法」検討のための基礎試験実施について
(2014年4月17日)