原子炉格納容器内部調査装置(形状変化型ロボット)の作業訓練の実施について
[日立GEニュークリア・エナジー]
(2015年2月3日)
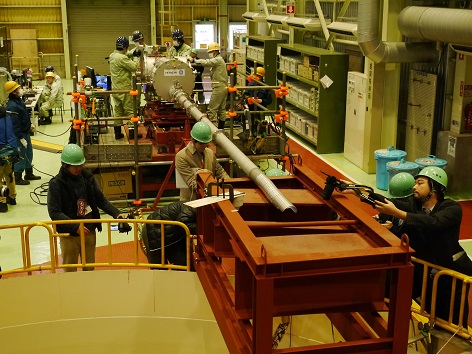
2015年2月3日、IRID技術委員会「燃料デブリ取り出しに関する機器開発・遠隔技術に関する専門部会」のメンバーを中心に、福島第一・1号機で実証試験を予定している原子炉格納容器(PCV)内部を調査する装置(形状変化型ロボット等)の作業訓練の様子を見学しました。
また、2月5日には、報道機関の方々にも同ロボットを公開しました。
今回視察したのは、IRID組合員である「日立GEニュークリア・エナジー」が担当する開発装置(実機)の作業訓練で、茨城県日立市にある日立GEニュークリア・エナジー 臨海工場で行いました。
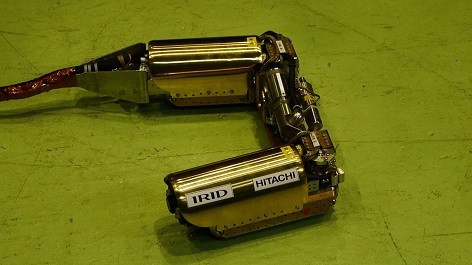
「形状変化型ロボット」は、形状変化という名前の通り、格納容器内に進入するために、まずは直径10cm程度の狭いパイプ内を「棒状」になって走行します。格納容器内に入ると、形状を屈曲させ障害物をよけながらケーブルでつり下げられていき、ペデスタル(圧力容器を支える構造物)外側1階のグレーチング(格子状の床面)上に着地します。この時に、安定して走行できるように「コの字」型に変形。搭載した調査用カメラと線量計、温度計を駆使して原子炉格納容器内の状況を細かく把握し、今後のデブリ取り出しに向けた情報を集めることを目的としています。なお、調査後は上記の逆手順で格納容器外のシールボックス(放射性物質飛散防止装置)に回収されます。
事故炉の格納容器の中に入るのは、ロボットとしては同機が初めてとなる予定で、2015年4~5月頃の調査開始に向けて訓練を重ねています。
IRIDでは、同ロボットが取得する格納容器内部の情報をもとに、さらなる調査装置の改良を行い、2015年度末には燃料が溶け落ちているとみられる格納容器下部(地下階)まで降りて調査を行う計画です。
※ロボットが、格納容器内部(模型)に進入し、パイプを抜けてからグレーチング上を走行するまでの様子と形状変化する様子を動画で紹介していますので、ぜひご覧ください。

視察の様子
- [写真]クリックすると大きいサイズの画像が開きます。
- [動画]「動画ダウンロード」をクリックすると、ZIP圧縮したMP4の動画データをダウンロードできます。
【写真】

専門部会による視察の様子1(2月3日)

専門部会による視察の様子2(2月3日)

専門部会の様子(2月3日)

形状変化型ロボット(パイプ通過時)

ロボットがコの字に変形中





形状変化型ロボット(グレーチング走行時)

ロボットが格納されたシールボックス(放射性物質飛散防止装置)。直径10cmのガイドパイプに接続される

形状変化型ロボットをPCV内に送り込む様子

直径10cmのガイドパイプをロボットが通過

ケーブルで吊り下げられながら下降するロボット





格納容器1階のグレーチング上に着地

走行を安定化させるために「コの字」に変形

報道機関への公開で挨拶を行う遠藤副部長(IRID)

ロボットの説明を行う高橋主任技師(日立GE)

報道機関からの質問に回答する高橋主任技師(日立GE)





- 研究開発
- 公開資料
- 平成30年度研究開発成果
- 平成29年度研究開発成果
- 平成28年度研究開発成果
- 平成27年度研究開発成果
- 研究紹介
- 原子炉格納容器内部調査装置(形状変化型ロボット)の実証試験の実施について(2015年4月20日)
- 原子炉格納容器内部調査装置(形状変化型ロボット)の作業訓練の実施について [日立GEニュークリア・エナジー](2015年2月3日)
- 原子炉格納容器(PCV)内部調査装置の開発状況について [東芝](2014年8月19日)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その3)水中遊泳ロボット(げんごROV)& 床面走行ロボット(トライダイバー)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その2)三菱MEISTeR(マイスター)
- 福島第一原子力発電所 建屋内で活躍するロボットについて「Rosemary(ローズマリー)」&「Sakura(サクラ)」
- 原子炉格納容器(PCV)漏えい箇所調査装置の開発状況について [東芝](2014年5月16日)
- ベント管内へ止水材(グラウト)を充填する「止水工法」検討のための基礎試験実施について
(2014年4月17日)