原子炉格納容器内部調査装置(形状変化型ロボット)の実証試験の実施について
(2015年4月20日)
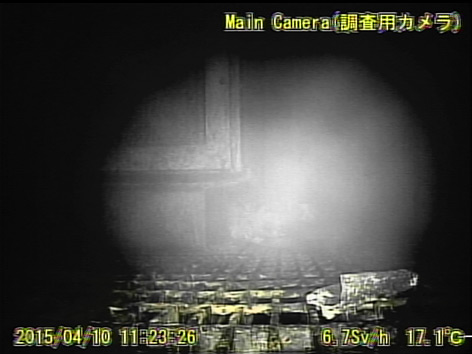
2015年4月10日および4月15日~20日、IRID組合員である日立GEニュークリア・エナジーが開発担当した「形状変化型ロボット」(2台)を活用して、福島第一・1号機の原子炉格納容器(PCV)内部の1階部分を調査する実証試験(B1調査)を行いました。
事故炉の格納容器の中に入るのは、ロボットとしては同機が初めてです。過酷な放射線環境下でも耐えられるように開発陣がロボットの改良を重ね、また投入作業や運転に携わる作業員がトレーニングを繰り返し行ってきた成果を存分に発揮しました。
今回の試験では、1台目のロボットが初日の調査途中で床面の隙間に挟まって動けなくなるという事象もありましたが、それまでの調査および2台目の6日間にわたる調査で、30~40年という長期にわたる廃炉作業に向けて十分な成果および重要な情報を取得でき、大きな第1歩を踏み出せたものと評価しています。
また、研究開発の面でも、実際の現場で試験を行えたことは貴重な経験となりました。今回の試験で良かった点や改善点など多くの知見を得られたので、今後これらをよく分析して改良を行い、次の研究開発に生かしていきます。
今回の実証試験を通じて、大きく次の成果が得られました。
- 次のB2調査※で使用予定の地下階への開口部を調べた結果、今後の調査に支障となるような干渉物が周囲にないことを確認できました。次の地下階調査につなげられます。
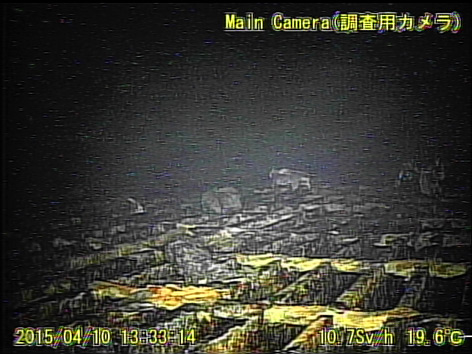
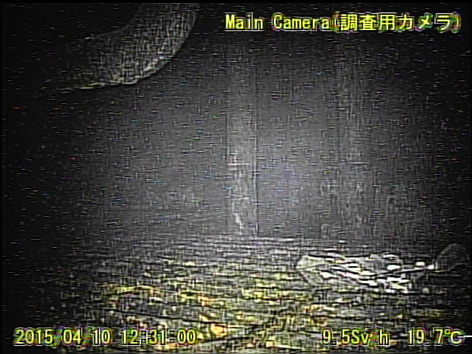
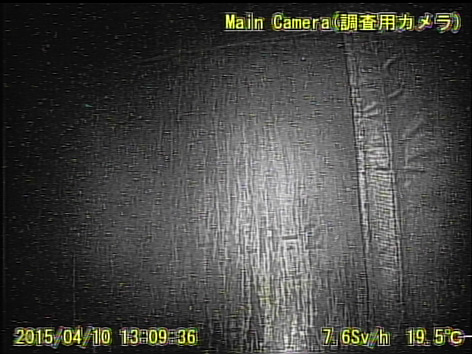
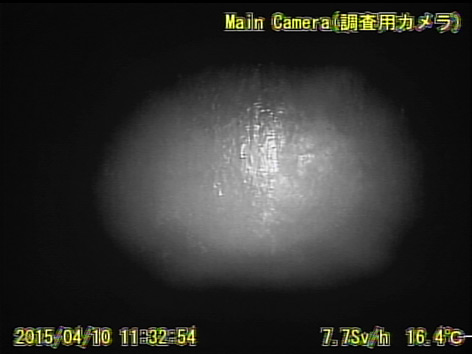
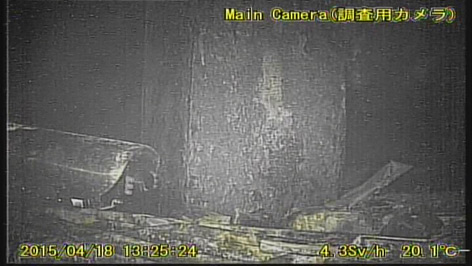
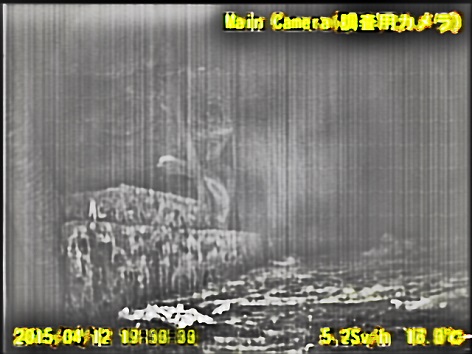
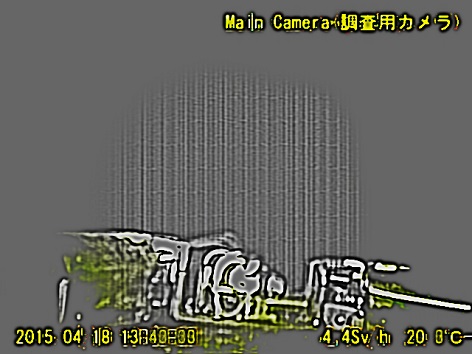
- 既存の設備(空調機、PLR配管やペデスタル壁面など)を調べたところ、映像を確認する限り損壊などの大きな損傷もなく、設計図面と大きな相違がないことを確認できました。廃炉作業のシナリオを検討するうえで、重要な知見を得られました。
- 今回の試験の中では、福島第一・1号機PCV内の放射線量率は、10Sv/h以下でした。同ロボットが搭載するカメラは1000Svまで耐えられるものを想定していたことから、約4日間は耐放射性に問題なく使用できる知見が得られました。今後の装置の運用時間の設定および改良に活用できます。
※B2調査: 燃料が溶け落ちているとみられる格納容器下部(地下階)まで降りて、燃料デブリの広がり状況などを映像などから確認する調査。今回取得した格納容器内部の情報をもとに、さらなる調査装置の改良を行い、2015年度末の調査実施を計画。
なお、今回の試験で使用したロボットは、回収が困難な場合には、計画手順に則り、無理に回収せず、1台目は安全面の確認を行ったうえで残置し、2台目は今後の作業・調査に支障とならない場所まで移動させて安定残置しました。
実証試験の際に得られた格納容器内の画像や動画を紹介していますので、是非ご覧ください。

実証試験でロボットが撮影した画像・動画
- [写真]クリックすると大きいサイズの画像が開きます。
- [動画]「動画ダウンロード」をクリックすると、ZIP圧縮したMP4の動画データをダウンロードできます。
【写真】
4/10調査実施分

着座直前
着座の状況

調査開始移動

アクセスルート上落下物(1)

アクセスルート上落下物(2)






アクセスルート上落下物(3)
アクセスルート上落下物(4)
地下階アクセス開口部(1)
地下階アクセス開口部(2)

地下階アクセス開口部(3)





地下階アクセス開口部(4)
PLR配管(1)

PLR配管(2)
ペデスタル壁面
機器ハッチ


HVH(下部中央)
HVH(下部端部)

4/15調査実施分
時計回りルート:HVH(D)(1)
時計回りルート:HVH(D)(2)
時計回りルート:HVH(E)(1)

時計回りルート:HVH(E)(2)
時計回りルート:PLR配管



4/16調査実施分

時計回りルート:PLRポンプ(A)(1)
時計回りルート:PLRポンプ(A)(2)

時計回りルート:PLRポンプ(A)(3)

時計回りルート:PLRポンプ(A)(4)
原子炉格納容器内壁面





4/18~19調査実施分

調査装置の状況

CRDレールまでのアクセスルートの確認

調査装置の搭載カメラ映像(1)

調査装置の搭載カメラ映像(2)

調査装置の搭載カメラ映像(3)






調査装置の搭載カメラ映像(4)
調査装置の搭載カメラ映像(5)

調査装置の搭載カメラ映像(6)

調査装置の搭載カメラ映像(7)



4/30調査のまとめ

CRDレール方向の撮影画像
CRDレール方向の撮影画像(画像処理後)

CRDレール方向の撮影画像

CRDレール方向の撮影画像(画像処理後)

モックアップ試験による映像



【動画】
-
1号機原子炉格納容器内部調査実証試験
(2015年4月13日撮影分) -
1号機原子炉格納容器内部調査実証試験
(2015年4月15日撮影分)
-
1号機原子炉格納容器内部調査実証試験
(2015年4月16日撮影分) -
1号機原子炉格納容器内部調査実証試験後の
追加確認結果(2015年4月18日撮影分)
- 研究開発
- 公開資料
- 平成30年度研究開発成果
- 平成29年度研究開発成果
- 平成28年度研究開発成果
- 平成27年度研究開発成果
- 研究紹介
- 原子炉格納容器内部調査装置(形状変化型ロボット)の実証試験の実施について(2015年4月20日)
- 原子炉格納容器内部調査装置(形状変化型ロボット)の作業訓練の実施について [日立GEニュークリア・エナジー](2015年2月3日)
- 原子炉格納容器(PCV)内部調査装置の開発状況について [東芝](2014年8月19日)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その3)水中遊泳ロボット(げんごROV)& 床面走行ロボット(トライダイバー)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その2)三菱MEISTeR(マイスター)
- 福島第一原子力発電所 建屋内で活躍するロボットについて「Rosemary(ローズマリー)」&「Sakura(サクラ)」
- 原子炉格納容器(PCV)漏えい箇所調査装置の開発状況について [東芝](2014年5月16日)
- ベント管内へ止水材(グラウト)を充填する「止水工法」検討のための基礎試験実施について
(2014年4月17日)