原子炉格納容器(PCV)内部調査装置の開発状況について [東芝]
(2014年8月19日)
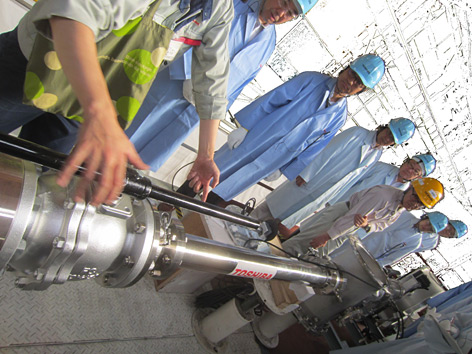
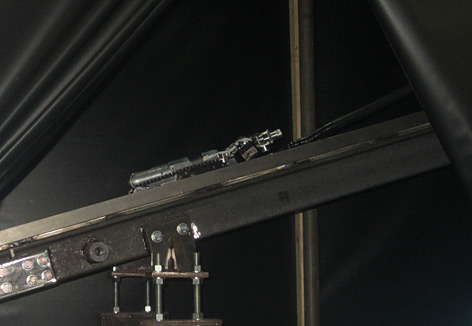
2014年8月19日、IRID技術委員会[燃料デブリ取り出しに関する機器開発・遠隔技術に関する専門部会]のメンバーを中心に、原子炉格納容器(PCV)内部を調査する装置(ロボット等)および実機によるモックアップ試験を見学しました。
今回視察したのは、IRID組合員である「東芝」が担当する装置で、横浜市鶴見区にある東芝 京浜事業所で研究開発を行っています。
福島第一原子力発電所1~3号機では、高温となった燃料が制御棒や原子炉圧力容器内の構造物とともに溶融し、原子炉圧力容器の底部や一部は原子炉格納容器の底部まで到達して、冷えて再び固まっていると推定されています。こうして溶けて固まった物質を「燃料デブリ」といいます。
廃炉作業を進めていくためには、この燃料デブリを取り出すことが必要ですが、原子炉格納容器内は、現在も放射線量がきわめて高く、人が近寄ることができません。
そのため、格納容器内部の状況を把握するために、遠隔で操作できるロボットが活躍します。
ロボット開発にあたって最も重要なのが、現場の状況を想定することです。今は通常と大きく異なる状況のため、さまざまなリスクを想定する必要があります。
福島第一原子力発電所の現場状況や最新の知見を踏まえて、今回の開発でも100を超えるリスクを洗い出し、対策に努めています。
【PCV内部調査方法】
- ① 今回の調査は、PCV内部へ通じる既設の円筒構造物(X-6ペネトレーション)を利用してPCVペデスタルの内部を調査する計画です。まずはX-6ペネの前にある遮へいブロックを遠隔操作で取り外し、穴を空けると同時にX-6ペネに隔離弁を据え付けます。
- ② さらに延長パイプを取り付けて、調査装置のアクセスルートを俯瞰的に事前に確認する事前確認装置を挿入します。同装置は、必要があれば、進行の妨げとなる可能性のあるX-6ペネ内のケーブルを押し崩していきます。
※ このパイプはCRDレール(制御棒駆動装置交換用レール)上まで挿入。 - ③ 上述のケーブルを押し崩して(進行の妨げとなっていた場合)進行ルートを確保したら、ガイドパイプなど残りの装置を取り付けて準備完了です。ここから、小型クローラータイプのロボットの登場です。
- ④ ガイドパイプのハッチが下向きに開いていき、CRDレールまでのスロープになります。小型ロボットは、ゆっくりとスロープを下っていきCRDレールに着座します。そのままレール上を進み、CRDプラットホームのグレーチングとの隙間を乗り越えて目的地(CRDプラットホームのグレーチング上)に到着です。
※ ロボット操作者は、これらの操作をロボット前後に搭載したカメラやガイドパイプ先端にある俯瞰カメラ、ケーブル
巻取り装置内や送り出し装置などの映像を確認しながら遠隔で行います。 - ⑤ 小型ロボットはグレーチング上を走行しながら、前後に搭載されたカメラで格納容器内部の状況を確認し、情報を蓄積していく計画です。
引き続き、同装置の試験を重ねるとともに、モックアップ設備を使ったトレーニングを継続していきます。2015年度上期中に、これらの装置を福島第一原子力発電所2号機で内部状況調査を開始予定です。
小型ロボットが、ガイドパイプを出発してCRDプラットホームのグレーチング上まで走行し、再び戻ってくるまでの一連の動作を動画で紹介しています。是非ご覧ください。(注)動画は3倍速で編集しています
視察の様子
- [写真]クリックすると大きいサイズの画像が開きます。
- [動画]「動画ダウンロード」をクリックすると、ZIP圧縮したMP4の動画データをダウンロードできます。
【写真】










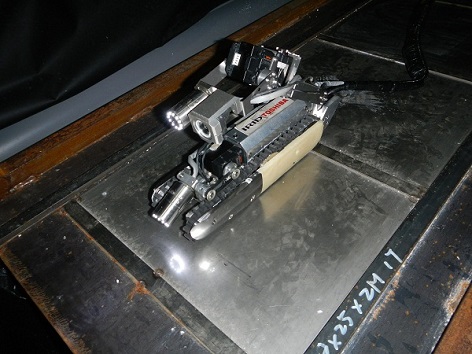
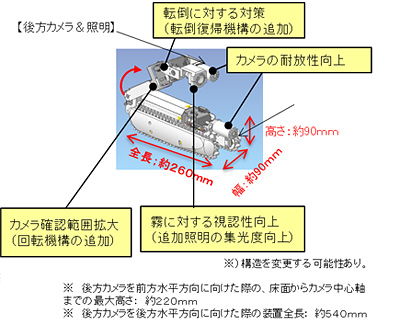
開発中のロボット

前方確認時(CRDレール上)

上方確認時(CRDプラットホーム上)

後方のカメラを変形させて開口部から下部を調査する様子

後方カメラ変形中

後方カメラを真下に向けてグレーチングの隙間から下部を調査する様子




※写真は開発中のものであるため構造を変更する可能性あり。
福島第一原子力発電所向け原子炉格納容器内部調査ロボットを開発(2015年6月30日)
原子炉格納容器内部調査ロボットの動画を、IRID組合員である東芝がYouTubeで公開しています。
- 研究開発
- 公開資料
- 平成30年度研究開発成果
- 平成29年度研究開発成果
- 平成28年度研究開発成果
- 平成27年度研究開発成果
- 研究紹介
- 原子炉格納容器内部調査装置(形状変化型ロボット)の実証試験の実施について(2015年4月20日)
- 原子炉格納容器内部調査装置(形状変化型ロボット)の作業訓練の実施について [日立GEニュークリア・エナジー](2015年2月3日)
- 原子炉格納容器(PCV)内部調査装置の開発状況について [東芝](2014年8月19日)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その3)水中遊泳ロボット(げんごROV)& 床面走行ロボット(トライダイバー)
- 福島第一原子力発電所 建屋内で活躍するロボットについて(その2)三菱MEISTeR(マイスター)
- 福島第一原子力発電所 建屋内で活躍するロボットについて「Rosemary(ローズマリー)」&「Sakura(サクラ)」
- 原子炉格納容器(PCV)漏えい箇所調査装置の開発状況について [東芝](2014年5月16日)
- ベント管内へ止水材(グラウト)を充填する「止水工法」検討のための基礎試験実施について
(2014年4月17日)