





Robots working inside the buildings at Fukushima Daiichi NPS (Part III) Swimming robot & Crawling robot
– Footage taken underwater inside the Unit 2 torus room –
In the third part of our series of articles introducing robots working inside the buildings at the Fukushima Daiichi NPS, we look at a swimming robot and a crawling robot, both developed by Hitachi GE Nuclear Energy.
In July 2014, the robots performed condition checks and a flow detection survey at five penetration points inside the Unit 2 torus room wall.
Like a diving beetle found in Japanese ponds, the Swimming robot swam effortlessly underwater, using a camera to inspect the penetration points and checking for flow using a tracer (clay particles). Meanwhile, Crawling robot measured and monitored the flow of the tracer using an ultrasonic sonar system.
The camera-based inspection found no significant damage in the areas surrounding the wall penetration points. The devices also successfully detected the absence of flow in the target locations using the tracer.
Similarly, use of the ultrasonic sonar at one of the five penetration points inspected found no flow.
- More details on these robots can be found on the TEPCO website:
- http://photo.tepco.co.jp/date/2014/201407-j/140728_01j.html
- [Photos] Click image to enlarge.
- [Videos] Click “Download video” to download MP4 file.
[Photos]

Swimming robot
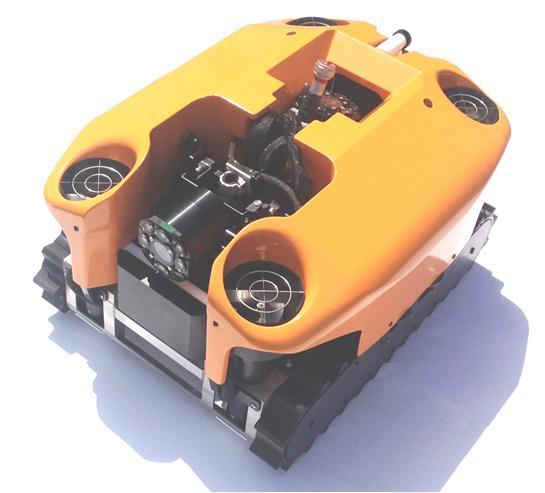
Crawling robot


[Videos]
-
Swimming robot installation
-
Swimming robot tracer applying etc.
-
Crawling robot installation
- Research and Development
- Released research report
- FY 2017 R&D Report
- Introduction Research
- Survey Device (Shape-changing Robot) Deployed to Inspect Interior of Primary Containment Vessel (PCV)
- Work Training of Device (Shape-changing Robot) to Inspect Interior of Primary Containment Vessel (PCV) [Hitachi-GE Nuclear Energy]
- Development status of equipment for internal PCV investigation [TOSHIBA]
- Robots working inside the buildings at Fukushima Daiichi NPS (Part III) Swimming robot & Crawling robot
- Robots working inside the buildings at Fukushima Daiichi NPS (Part II) MHI-MEISTeR
- Robots working inside the buildings at Fukushima Daiichi NPS Rosemary & Sakura
- Development Status of PCV Leakage Investigation Devices (Toshiba)
- Preliminary Test for “Water Stoppage Method” by Grouting into the Vent Pipe